Robotics in Minimally Invasive Surgery (RMIS) has demonstrated to overcome many of the obstacles introduced by traditional laparoscopic techniques, by improving the surgeon's maneuverability, the precision, and restoring hand-eye coordination and depth perception during the surgical procedure. Nevertheless, even if surgeons can benefit from such advanced technologies, the core of the surgery still relies on their degree of expertise and experience, and on their ability, for example, to fuse pre-operative information intra-operatively, making the outcome of the surgery vary according to the surgeon’s skill.
In laparoscopic abdominal surgery, for example, intra-operative bleeding is one of the major complications that affects the outcome of minimally invasive surgical procedures. One of the causes is attributed to accidental damages to arteries or veins, and one of the possible risk factors falls on the surgeon's skills.
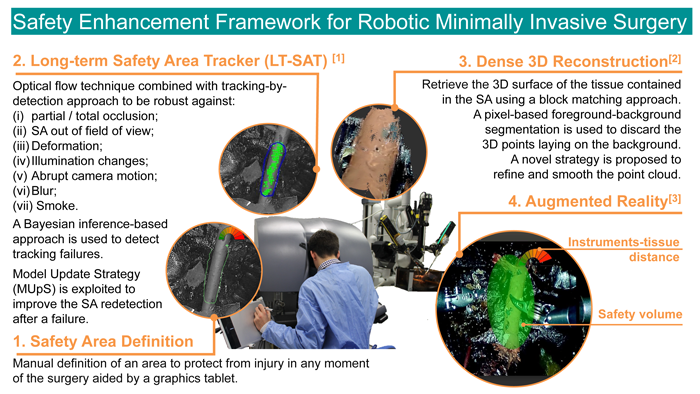
The Enhanced Vision System for Robotic Surgery (EnViSoRS) aims at enhancing the surgeon’s capabilities by providing Augmented Reality (AR) assistance towards the protection of vessels from injury during the execution of laparoscopic surgical procedures with a robot.
EnViSoRS was integrated with a commercial robotic surgical system (the dVRK system) for testing and validation. The execution of a simulated surgical task on a liver phantom[4] demonstrated that the accuracy, robustness, performance, and usability of EnViSoRS were in accordance with surgical requirements (<5 mm). Qualitative results regarding the system usability indicate that the proposed system integrates well with the commercial surgical robot and has indeed potential to offer useful assistance during real surgeries.