The outcomes of precision laser microsurgeries are directly linked to the control of the aiming and activation of the high power laser used for the interventions. However, such control is extremely difficult even with state-of-the-art surgical devices. This makes the surgeon’s experience and dexterity critical factors dictating the quality of the operations.
To solve this laser controllability problem, we developed the Virtual Scalpel system. This system allows surgeries to be safely and precisely performed using a graphics pen directly over a live video from the surgical site. This was shown to eliminate hand-eye coordination problems that affect other microsurgery systems and to make full use of the operator’s manual dexterity without requiring extra training.
The Virtual Scalpel is based on a tablet PC and a motorized laser micromanipulator (such as our CALM device). Custom robotic controllers guarantee precise matching between a point touched on the live video and the laser aiming point at the surgical site.
In addition, the system allows automatic laser control based on new intraoperative planning software, and also offers features for safety improvements based on virtual features.

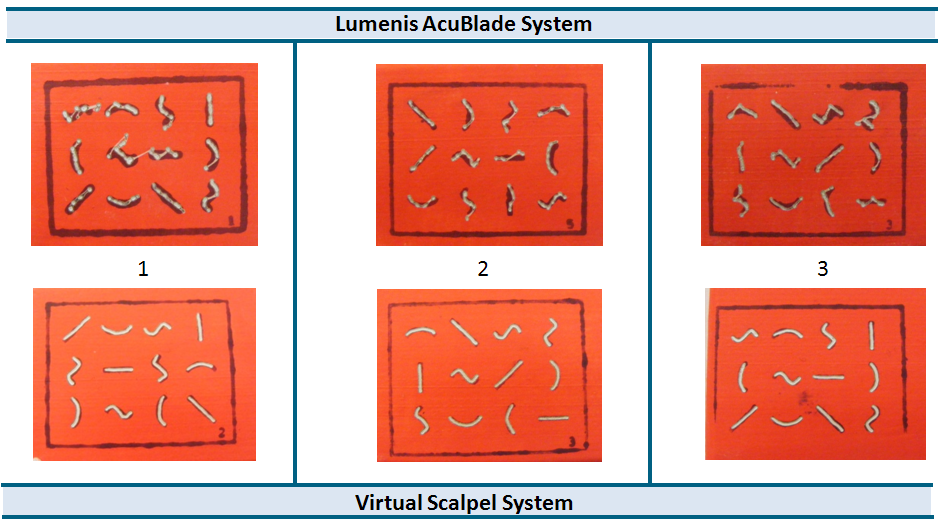
Extensive experimentation was performed to compare the Virtual Scalpel system with many different laser control methods. The Virtual Scalpel was deemed the most intuitive, accurate and safe control method.
Comparisons against state-of-the-art systems used in operating rooms demonstrated this new interface enables around 50% reduction in trajectory tracing RMS errors with similar reduction in the magnitude of maximum absolute errors. These results provide evidence of the great improvements in terms of precision and controllability provided by the technology.